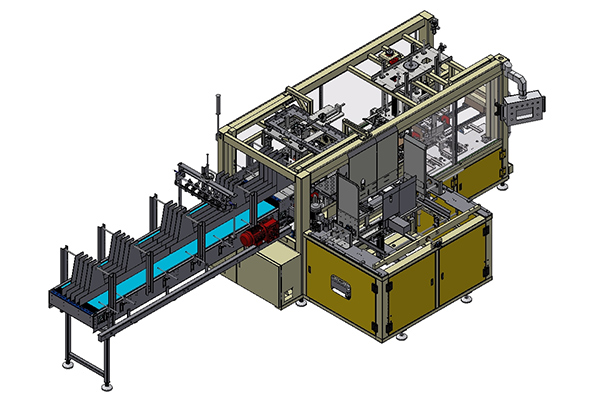
Servokoordinatförpackningslinje (med kartongpartition)

Förpackningsproduktionslinjen består av en höghastighetsdelare, en produkttransportlinje, en griptransportlinje, en Hbot, en dubbelaxlad förflyttningsmekanism, en lådtransportlinje, en detekteringsmekanism, en gripdon för kartongskiljeväggar, ett matningssystem för kartongskiljeväggar, en servokoordinat, en flaskgripdon och ett skyddsstängsel. Höghastighetsdelaren delar upp produkterna i flera banor, medan den dubbelaxlade förflyttningsmekanismen accelererar produktpassagen. Efter att produkten anlänt till kartongskiljeväggsstationen lastar Scar-roboten kartongskiljeväggen i de arrangerade produkterna. Produkterna anländer till sorteringstransportören. Därefter plockas produkterna upp med gripdon och placeras i kartongen, och lådtransportören transporterar ut kartongen som innehåller produkten.
Den kompletta packningssystemets layout

Huvudkonfiguration
| Robotarm | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servomotor | Siemens/Panasonic |
| VFD | Danfoss |
| Fotoelektrisk sensor | SJUK |
| Pekskärm | Siemens |
| Lågspänningsapparater | Schneider |
| Terminal | Fågel Fenix |
| Pneumatisk | FESTO/SMC |
| Sugande skiva | PIAB |
| Lager | KF/NSK |
| Vakuumpump | PIAB |
| PLC | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Kedjeplatta/kedja | Intralox/rexnord/Regina |
Beskrivning av huvudstrukturen




Fler videoprogram
- Servokoordinatförpackning för glasflaskor med kartongskiljevägg